「背屈可動域は良好と思ってたけど、制限があった」
「他動では可動域出るのに、動きの中だと背屈が出来ていない」
「動きの中で背屈可動域を出せるようにしたい」
ここ最近はこのような相談を受けることがとても多いです。
あなたもこんな悩みはありませんか?
他動の関節可動域がとれているのに、
実際に歩行などの動きになると可動域がとれていない
おかしいなぁ・・・
結構私は臨床現場で悩みました。
どうしても関節可動域評価となると、
他動での可動域評価と訓練しか最初は学ばないので
実践でその可動域をどのように活かしてあげるかは
もう少し応用が必要になってきます。
私が良くなかったこととしては
「まずは関節可動域に制限があれば、それを改善させよう!」
と思ってひたすら他動の関節可動域を出して
「これで動きは良くなる!」と思っていたところです。
結果として
もちろん良くなる人もたまにいましたが
「思ったより動きが良くならないなぁ」
「歩行やスクワットやランジでも可動域が変わってないなぁ」
なんてことがほとんど・・・
これでは患者さんの動きを変えて痛みを改善させることはできません。
大前提として
必要な動作を改善するために関節可動域を広げることは非常に大事なアプローチです!
可動域を広げることが悪いわけではありませんよ!
その可動域を動作の中で活かすにはどうすれば良いのか
これを足関節背屈の視点から今回はお伝えしていこうと思います!
せっかく可動域訓練をしたり徒手療法が動きを良くしたのに
なかなか動作に結びつかないなぁと悩んでいる方には
今回の内容はお役に立てるかもしれません。
是非最後までお読みください!
他動的な可動域と自動的な可動域の違い
ではそもそもなぜ他動的な可動域は良好だったのに
自動ではうまく動かせなかったのか?
それはモビリティが足りていなかったからです!
え?
モビリティって可動域のことでしょ?
他動的な可動域は良好なんだからモビリティはあるでしょ!?
と思われるでしょう。
私も最初はそう思っていました。
ですが
モビリティというものの定義は
「特定の条件や状況下において、目的とする動きを行う能力」
のことを良います。
柔軟性には個別の筋肉の伸張性という考え方が強いのに対し、
モビリティは伸長性、柔軟性、可動域だけでなく、関節構造上の問題や運動制御の問題も含みます。
ただ関節の可動性が高いだけでなく、動作をコントロールする能力が大切なのです。
可動性が低下していると
その関節の固有受容器の働きも低下してしまいます。
モビリティに影響を与える因子は3つ存在します!
(正直今回はこれだけ憶えてもらえればOKです!)
①組織の伸長性不全
筋肉や筋膜などの柔らかさ
→ストレッチやリリースで対応
②関節の可動性不全
関節がスムーズに動くかどうか
→外科的なアプローチや関節モビライゼーションで対応
③モーターコントロール不全
運動をどのようにコントロールするか
→コレクティブエクササイズで対応
動作不良に関してはこれらの3つで考えると
どこが問題でどんなアプローチをすれば良いのかが明確になりやすいです!
私も基本的にはこれをもとに評価してアプローチをしています。
そして最終的には
重力下において固有受容器が適切に働き、動きをコントロールできるところがゴールになります。
なぜそれぞれ機能不全になってしまうのかは因子が多すぎますが
潜在的因子は簡単に列挙しておきますね!
●筋肉や関節の結合組織が弾力性を失うこと
●硬皮症や火傷の障害を含む皮膚の疾患
●筋緊張
●拘縮
●反射
●自動運動における協調と強度の欠如
●共同する他の筋肉から受ける制限
●骨と関節の構造上の制限
●ホルモン
●痛み
●恐怖感
●ギプスやコルセットによる固定
●個人的な行動パターン
●職業
●服用薬
他にもありますが、割と出くわすことが多い因子ですね。
なぜ自動で足関節背屈ができなかったのか?
他動的な可動域としては足関節背屈は問題なかった
ということは
①組織の伸長性不全
②関節の可動性不全
による制限ではなかったということですね。
もし①と②のどちらかがあれば、他動的な可動域評価においてひっかかるはずです。
なので
モーターコントロール不全であると考えられます。
獲得できた可動域の範囲をコントロールできていないというこです。
これではもったいないですよね?
モーターコントロールを改善させるためには
中枢神経系、モータープログラム、運動の組織化、協調性、固有感覚、筋の抑制
これらを促していく必要があります。
臨床現場では
固有感覚の低下により悪い動きが学習され
可動域や安定させる筋肉の強化をするだけでは動きが改善されないことが多いです。
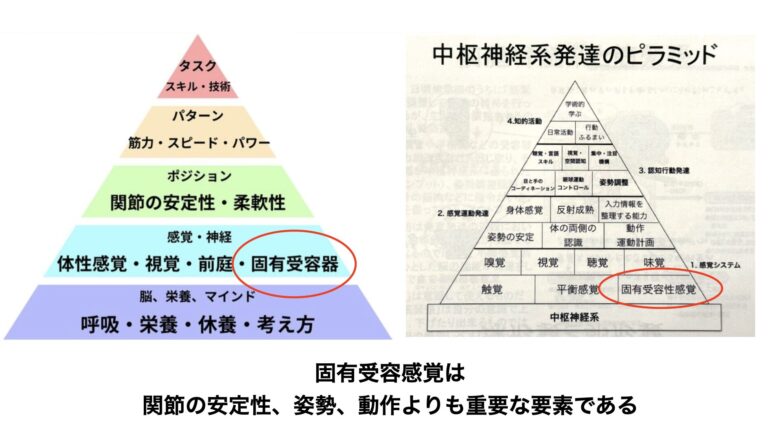
中枢神経系のパフォーマンスピラミッドで考えても
姿勢の安定や動作よりも固有受容性感覚が下にあり、
その重要度の高さが示されています。
特に足関節に関しては
背屈の可動域が低下していても
外転で代償すれば歩行は可能ですし
後足部のアライメントが崩れていても、
痛みがなければ立つことも動くことも可能です。
足部のアライメントが崩れている環境が続けば続くほど
固有受容器は本来の機能が発揮できず
足部は悪い動きを学習しています。
その動きは
たとえ関節可動域を拡大させたとしても
すぐには変わりません。
再学習させる必要があるのです!
従来、安定性が低下している場合には
身体のスタビライザー(安定筋)という筋群を強化をすることがメインでした。
しかし、真の安定性というのは固有受容感覚による反射性のもので
全体的な筋力よりも必要なタイミングで発揮できることです。
じゃあ何をすれば良いのか?
モビリティ改善をさせる方法
「これだけやれば良い!」
というのがないのが残念なのですが
改善のための最短の手順はあります!
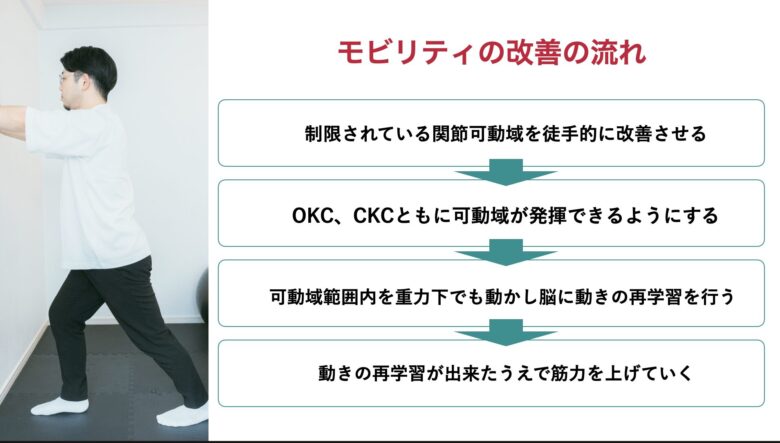
①他動的な可動域の改善
→「組織の伸長性不全」「関節の可動性不全」に対しての徒手的アプローチ
↓
②重力下でのCKCでの可動性の確保
↓
③コレクティブエクササイズで可動範囲内をコントロール
という流れになります
私は②までしか進めてなかったから
実際の動作時にコントロールができず崩れてしまっていました・・・
③までを確実に行うことが大事です!
足関節背屈で考えると
①背屈可動域拡大のためのアプローチ
(距骨の後方滑走、アキレス腱の滑走性と伸張性、後足部アライメント、脛腓関節及び距腿関節アライメント)
↓
②立位でのランジ、スクワットでの動き
CKCで可動域が出せているか
↓
③コレクティブエクササイズ (OKC、CKCともに代償なく可動範囲内をコントロールできていること)
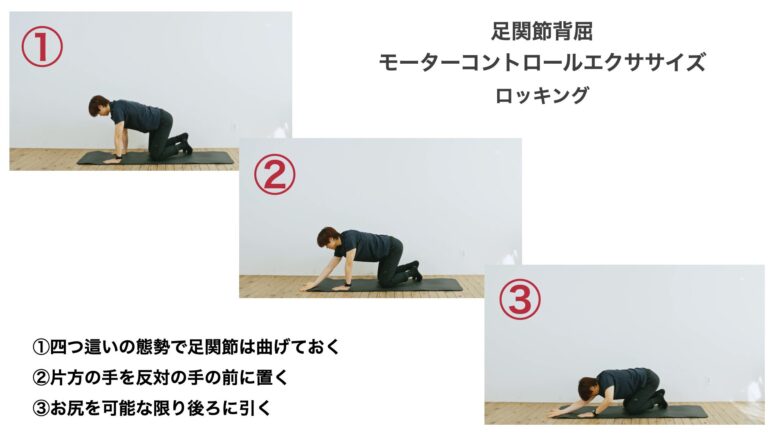
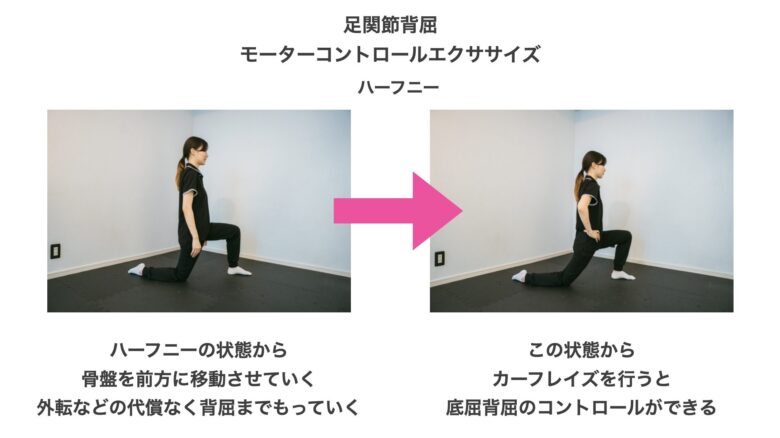
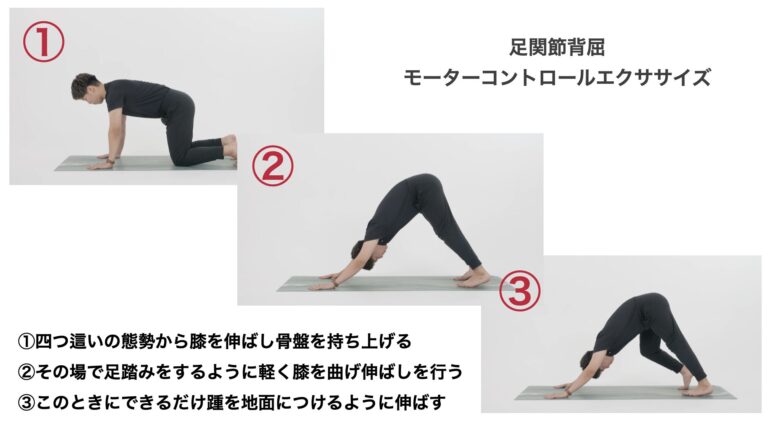
私が③のコレクティブエクササイズで実際に行うものをいくつか紹介します!
もちろんこれらのエクササイズで
モーターコントロールを獲得できると
その後の可動域も崩れることなく動作を遂行可能になります。
そしてもう一つ!
動きの再学習にもってこいのものがあります!
もちろん各関節のモーターコントロールがある程度良くないと難しいのが前提ですが
正しい動きを学習させる環境を作ってしまうことも有効です。
その方法の一つがインソールですね!
フォームソティックス・メディカルのような矯正インソールは
正しいアライメントにして動きを促すため、正しい運動学習としては非常に有効です。

正しいアライメントであれば固有受容器にもしっかり刺激が入るため
効率の良い動きが歩いているだけで学習されやすくなります。
モーターコントロール×インソールが
固有受容器への刺激と運動再学習にとても有効は方法ではないかなと思って
私は積極的に両方合わせて活用をしています。
是非試してみてくださいね!